Publications.
-
 Scalable GPU Construction of 3D Voronoi and Power Diagrams
Scalable GPU Construction of 3D Voronoi and Power Diagrams
Simulation, Theory & foundations
ACM SIGGRAPH 2026 Conference Papers -
IDSplat: Instance-Decomposed 3D Gaussian Splatting for Driving Scenes
Simulation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (Findings), 2026 -
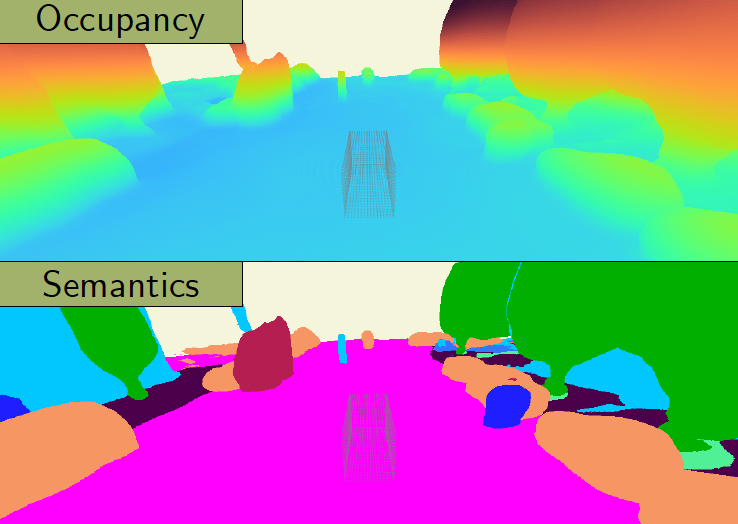 QueryOcc: Query-based Self-Supervision for 3D Semantic Occupancy
QueryOcc: Query-based Self-Supervision for 3D Semantic Occupancy
Perception & motion forecasting
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 -
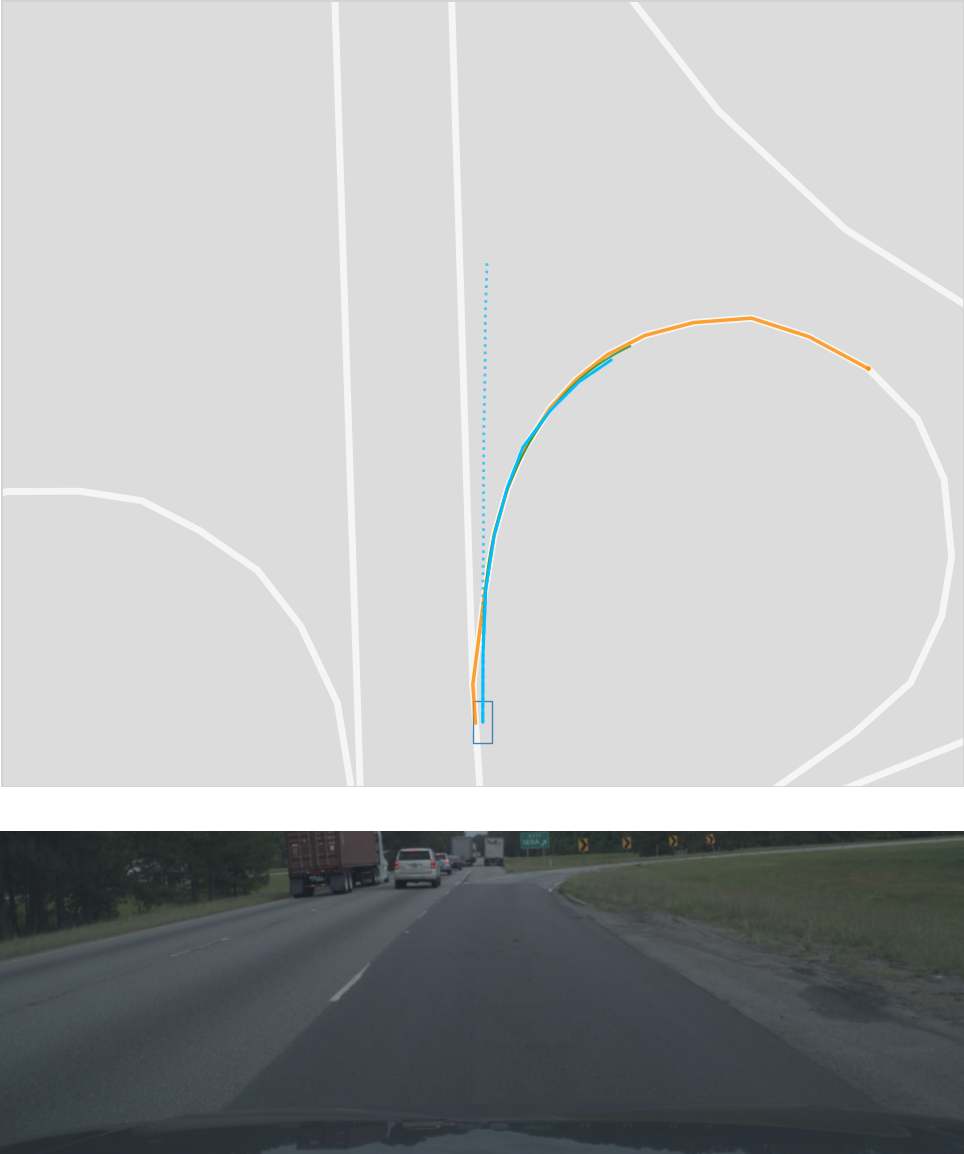 SD-RouteFusion: Ego-Trajectory Prediction with SD-Map Route Conditioning
SD-RouteFusion: Ego-Trajectory Prediction with SD-Map Route Conditioning
Perception & motion forecasting
29th International Conference on Information Fusion, 2026 -
 B2F-Map: Crowd-sourced Mapping with Bayesian B-spline Fusion
B2F-Map: Crowd-sourced Mapping with Bayesian B-spline Fusion
Localization & mapping, Perception & motion forecasting
IEEE International Conference on Robotics and Automation (ICRA), 2026 -
 R3D2: Realistic 3D Asset Insertion via Diffusion for Autonomous Driving Simulation
R3D2: Realistic 3D Asset Insertion via Diffusion for Autonomous Driving Simulation
Simulation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2026 -
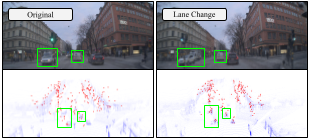 NeuRadar: Neural Radiance Fields for Automotive Radar Point Clouds
NeuRadar: Neural Radiance Fields for Automotive Radar Point Clouds
Simulation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2025 -
 GASP: Unifying Geometric and Semantic Self-Supervised Pre-training for Autonomous Driving
GASP: Unifying Geometric and Semantic Self-Supervised Pre-training for Autonomous Driving
Representation learning, Perception & motion forecasting
Winter Conference on Applications of Computer Vision (WACV), 2026 -
 SplatAD: Real-Time Lidar and Camera Rendering with 3D Gaussian Splatting for Autonomous Driving
SplatAD: Real-Time Lidar and Camera Rendering with 3D Gaussian Splatting for Autonomous Driving
Simulation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 -
Towards Accurate Ego-lane Identification with Early Time Series Classification
Perception & motion forecasting, Localization & mapping
arXiv -
NeuroNCAP: Photorealistic Closed-loop Safety Testing for Autonomous Driving
Simulation, Verification & validation, Datasets & benchmarks
European Conference on Computer Vision (ECCV), 2024 -
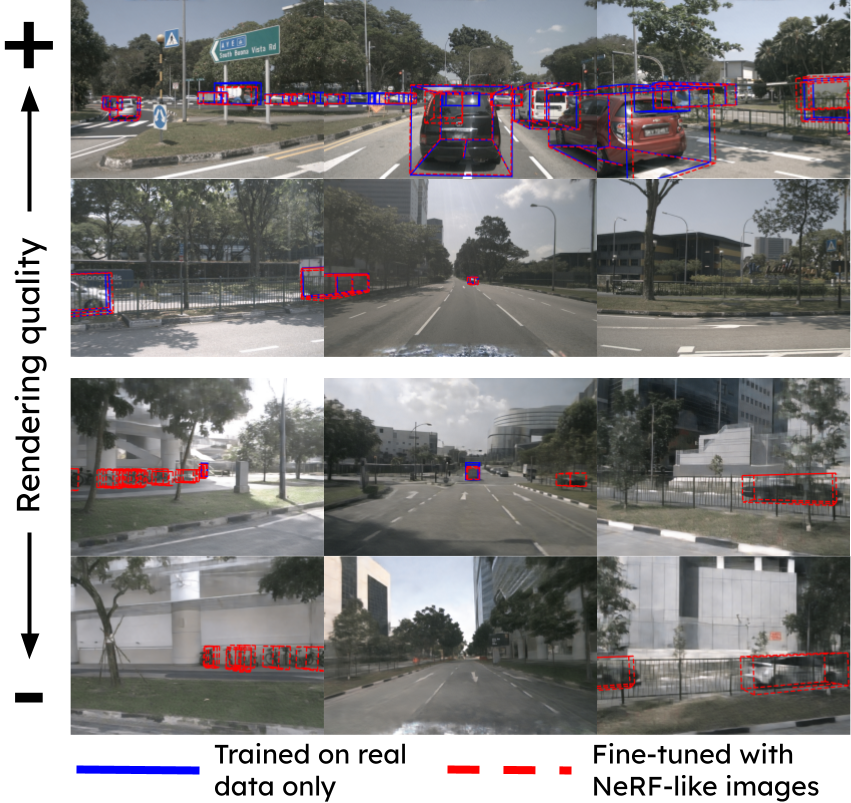 Are NeRFs ready for autonomous driving? Towards closing the real-to-simulation gap
Are NeRFs ready for autonomous driving? Towards closing the real-to-simulation gap
Simulation, Perception & motion forecasting
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2024 -
On proving that an unsafe controller is not proven safe
Theory & foundations
Journal of Logical and Algebraic Methods in Programming -
NeuRAD: Neural Rendering for Autonomous Driving
Simulation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 -
 Robust stutter bisimulation for abstraction and controller synthesis with disturbance
Robust stutter bisimulation for abstraction and controller synthesis with disturbance
Theory & foundations
Automatica -
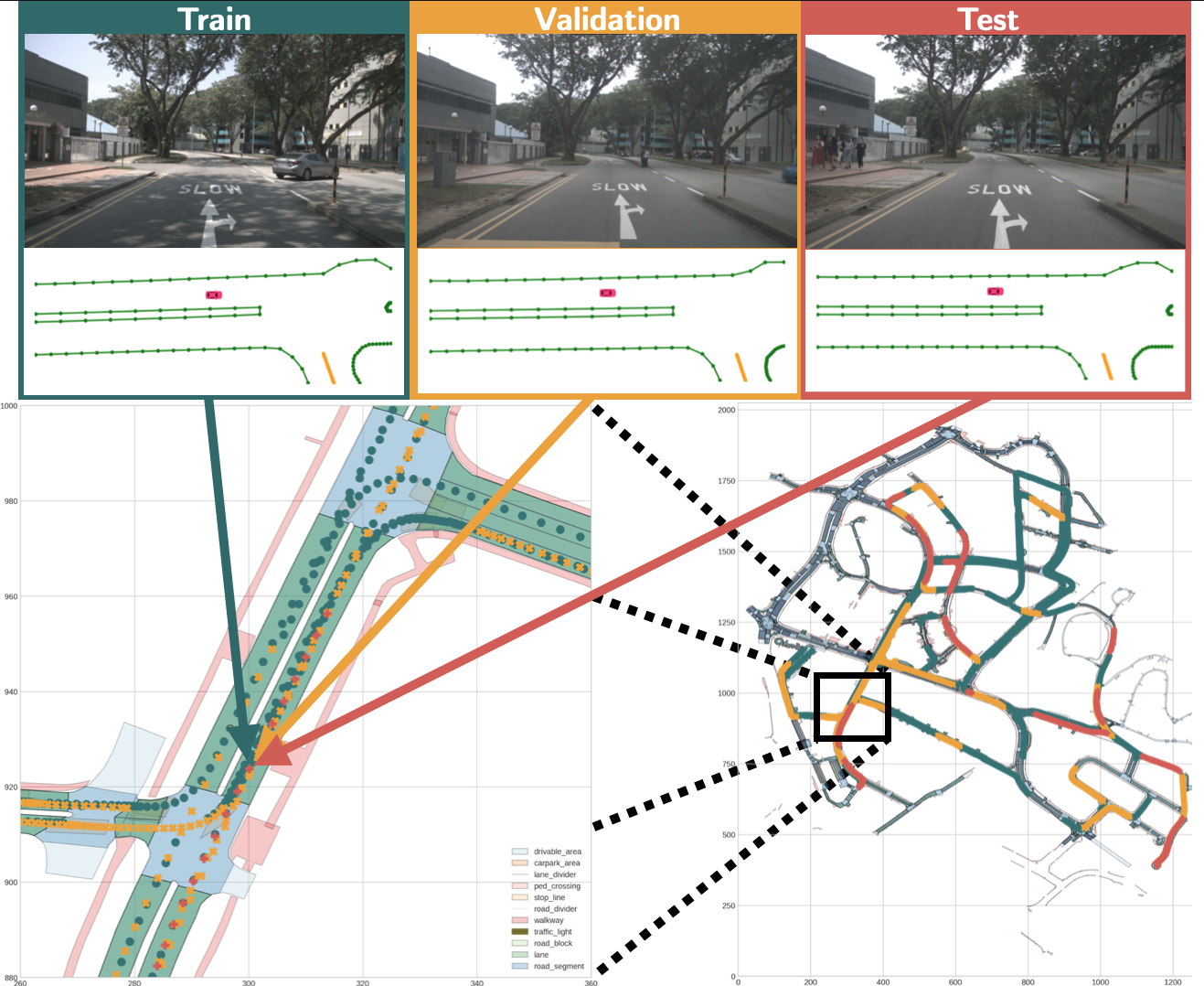 Localization Is All You Evaluate: Data Leakage in Online Mapping Datasets and How to Fix It
Localization Is All You Evaluate: Data Leakage in Online Mapping Datasets and How to Fix It
Perception & motion forecasting, Localization & mapping, Datasets & benchmarks
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 -
You can have your ensemble and run it too — Deep Ensembles Spread Over Time
Perception & motion forecasting
International Conference on Computer Vision (ICCV), 2023 -
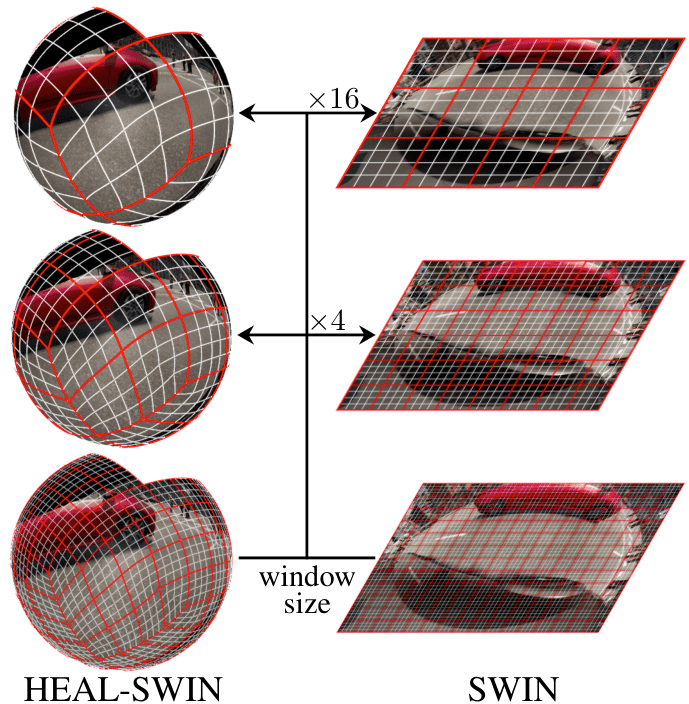 HEAL-SWIN: A Vision Transformer On The Sphere
HEAL-SWIN: A Vision Transformer On The Sphere
Perception & motion forecasting
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 -
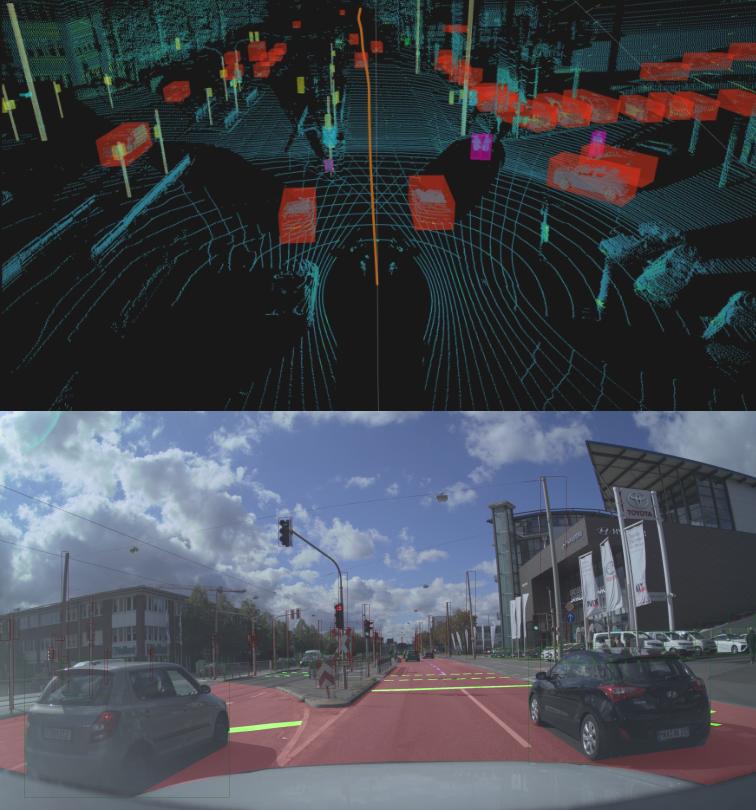 Zenseact Open Dataset: A large-scale and diverse multimodal dataset for autonomous driving
Zenseact Open Dataset: A large-scale and diverse multimodal dataset for autonomous driving
Datasets & benchmarks, Perception & motion forecasting
International Conference on Computer Vision (ICCV), 2023 -
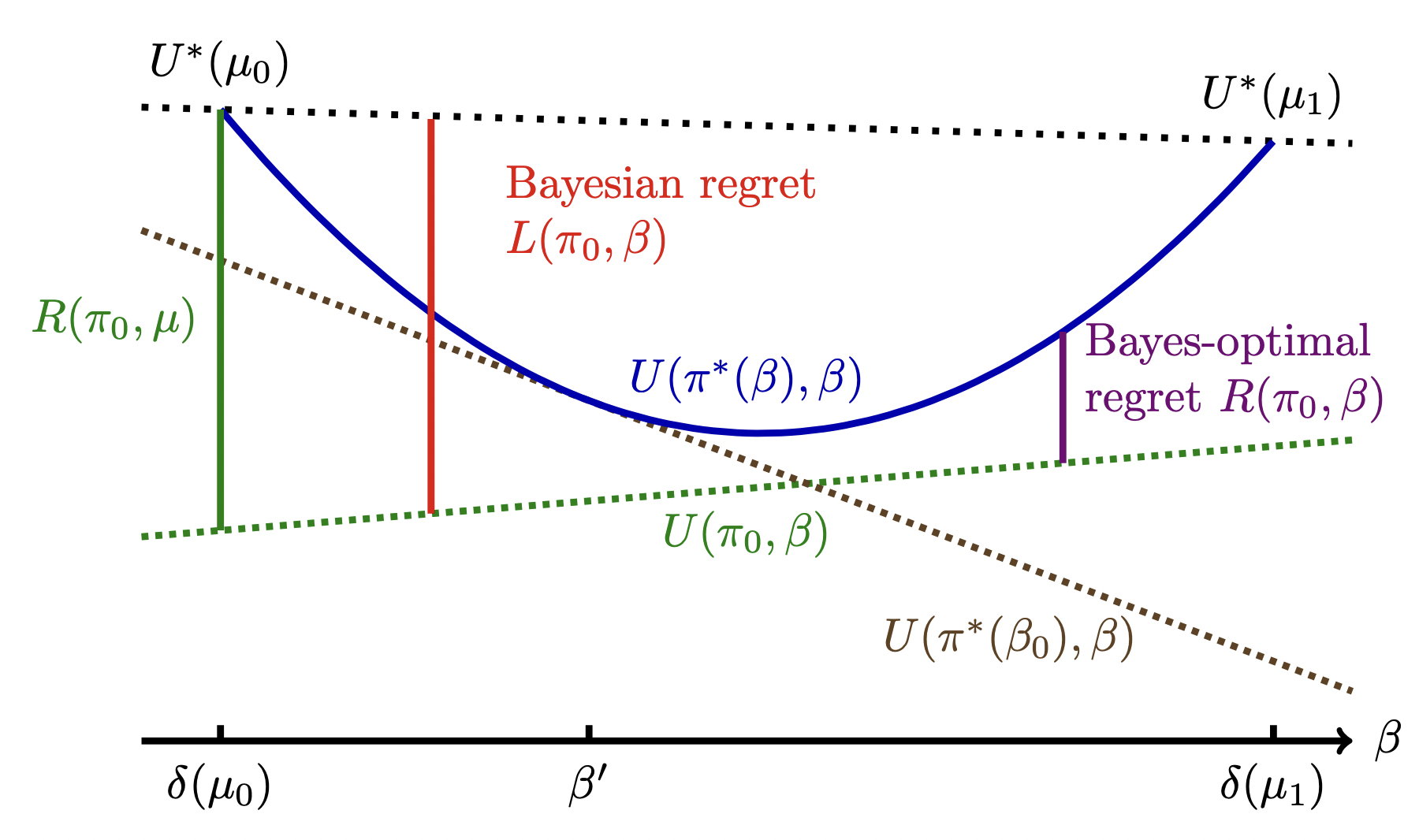 Minimax-Bayes Reinforcement Learning
Minimax-Bayes Reinforcement Learning
Theory & foundations, Planning & decision-making
The 26th International Conference on Artificial Intelligence and Statistics (AISTATS), 2023 -
Reinforcement Learning in the Wild with Maximum Likelihood-based Model Transfer
Theory & foundations, Planning & decision-making
The 23rd International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), 2024 -
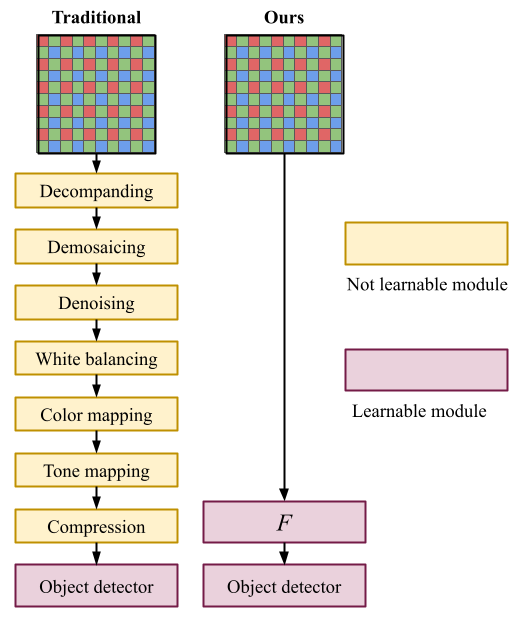 Raw or Cooked? Object detection on RAW images
Raw or Cooked? Object detection on RAW images
Perception & motion forecasting
Scandinavian Conference on Image Analysis (SCIA), 2023 -
LidarClip or: How I learned to talk to point clouds
Perception & motion forecasting, Representation learning
Winter Conference on Applications of Computer Vision (WACV), 2024 -
On how to not prove faulty controllers safe in differential dynamic logic
Theory & foundations
The 23rd International Conference on Formal Engineering Methods (ICFEM) 2022 -
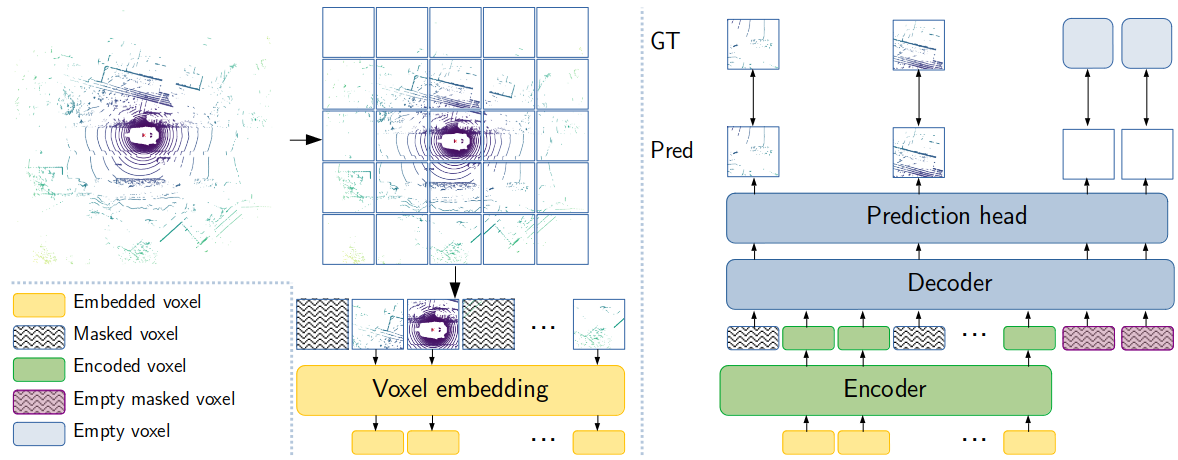 Voxel-MAE: Masked Autoencoder for Self-Supervised Pre-Training on Lidar Point Clouds
Voxel-MAE: Masked Autoencoder for Self-Supervised Pre-Training on Lidar Point Clouds
Representation learning
Winter Conference on Applications of Computer Vision (WACV), 2023 -
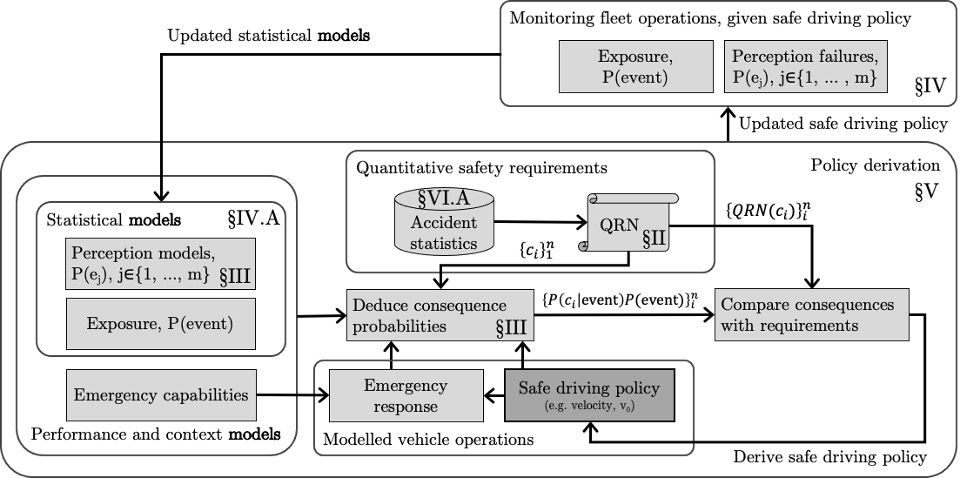 Uncertainty Aware Data Driven Precautionary Safety for Automated Driving Systems Considering Perception Failures and Event Exposure
Uncertainty Aware Data Driven Precautionary Safety for Automated Driving Systems Considering Perception Failures and Event Exposure
Safety
33rd IEEE Intelligent Vehicles Symposium (IV), 2022 -
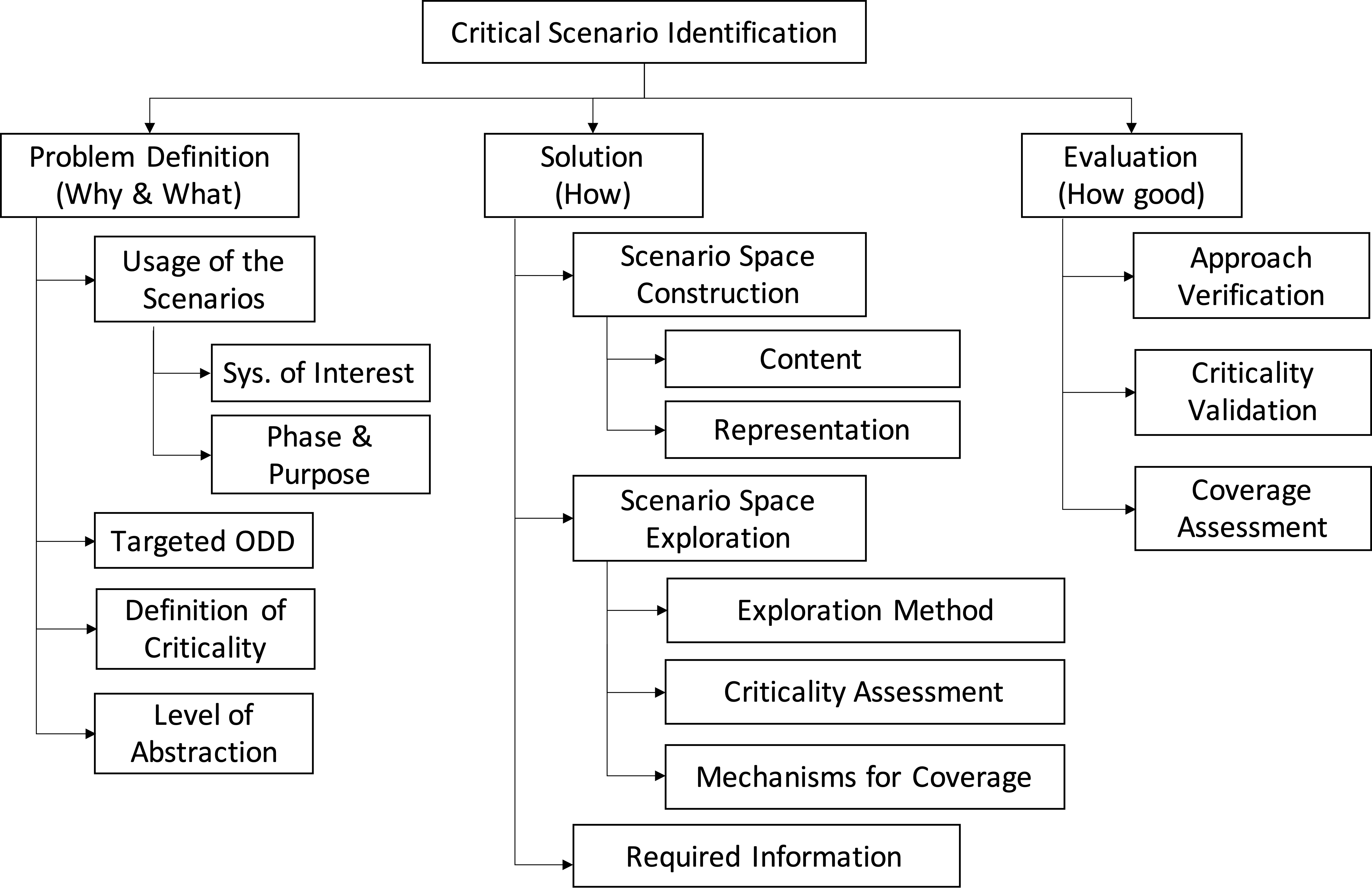 Finding critical scenarios for automated driving systems-A systematic mapping study
Finding critical scenarios for automated driving systems-A systematic mapping study
Verification & validation
IEEE Transactions on Software Engineering (TSE) -
Future Object Detection with Spatiotemporal Transformers
Perception & motion forecasting
What is Motion for? A ECCV Workshop, 2022 -
 Object Detection as Probabilistic Set Prediction
Object Detection as Probabilistic Set Prediction
Perception & motion forecasting
European Conference on Computer Vision (ECCV), 2022 -
 Minimal risk condition for safety assurance of automated driving systems
Minimal risk condition for safety assurance of automated driving systems
Safety
CARS 2021 - 6th International Workshop on Critical Automotive Applications - Robustness and Safety -
 ADS Safety Assurance – Future Directions
ADS Safety Assurance – Future Directions
Safety
CARS 2021 - 6th International Workshop on Critical Automotive Applications - Robustness and Safety -
SENTINEL: Taming Uncertainty with Ensemble based Distributional Reinforcement Learning
Theory & foundations, Planning & decision-making
The 38th Conference on Uncertainty in Artificial Intelligence (UAI), 2022 -
Formal Synthesis of Safe Stop Tactical Planners for an Automated Vehicle
Planning & decision-making, Verification & validation, Theory & foundations
Workshop on Discrete Event Systems (Wodes) 2020 -
Reinforcement Learning with Uncertainty Estimation for Tactical Decision-Making in Intersections
Planning & decision-making
IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020 -
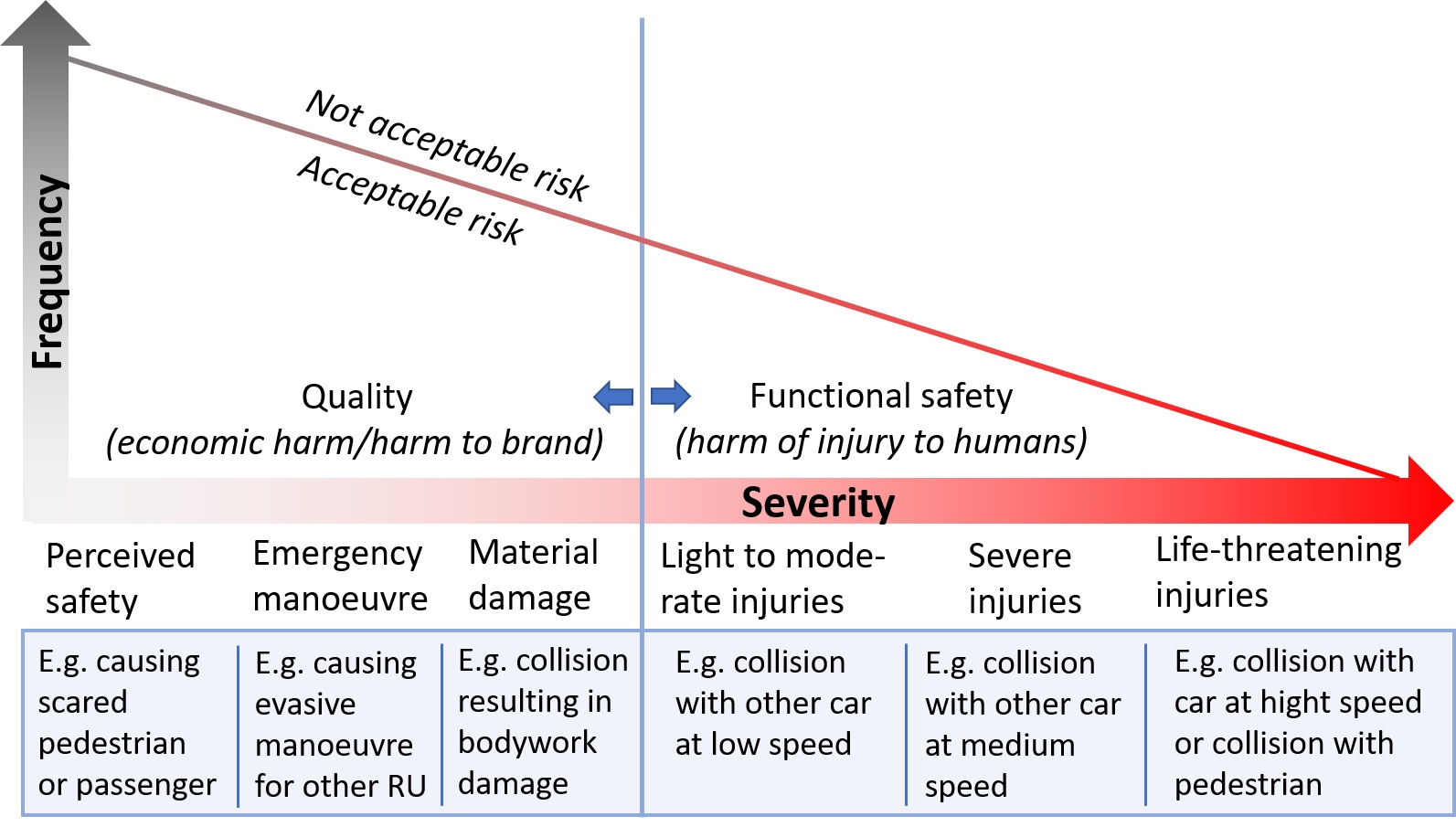 The quantitative risk norm-a proposed tailoring of HARA for ADS
The quantitative risk norm-a proposed tailoring of HARA for ADS
Safety
50th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W) -
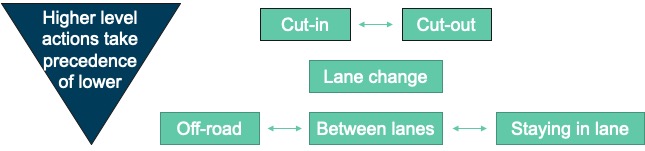 Defining Fundamental Vehicle Actions for the Development of Automated Driving Systems
Defining Fundamental Vehicle Actions for the Development of Automated Driving Systems
Verification & validation, Safety
SAE World Congress Experience (SAE WCX), 2020 -
 Towards an Operational Design Domain That Supports the Safety Argumentation of an Automated Driving System
Towards an Operational Design Domain That Supports the Safety Argumentation of an Automated Driving System
Safety
10th European Congress on Embedded Real Time Systems (ERTS), 2020 -
Learning When to Drive in Intersections by Combining Reinforcement Learning and Model Predictive Control
Planning & decision-making
IEEE 22nd International Conference on Intelligent Transportation Systems (ITSC), 2019 -
Comparative Case Studies of Reactive Synthesis and Supervisory Control
Theory & foundations
2019 18th European Control Conference (ECC) -
Design and Formal Verification of a Safe Stop Supervisor for an Automated Vehicle
Verification & validation, Safety
2019 International Conference on Robotics and Automation (ICRA) -
Learning Negotiating Behavior Between Cars in Intersections using Deep Q-Learning
Planning & decision-making
IEEE 21st International Conference on Intelligent Transportation Systems (ITSC), 2018 -
Modeling and Synthesis of the Lane Change Function of an Autonomous Vehicle
Planning & decision-making, Verification & validation, Theory & foundations
14th Workshop on Discrete Event Systems (Wodes) 2018